Répondre à : Projet "robot car" en Arduino / étape 1 : assemblage
Accueil › Forums › Forums : Tous nos Projets › Projet "robot car" en Arduino / étape 1 : assemblage › Répondre à : Projet "robot car" en Arduino / étape 1 : assemblage
Test des capteurs et modules
Voila châssis et les roues sont assemblés.
Avant de fixer les différents capteurs , nous allons les tester un à un afin de s’assurer qu’ils fonctionnent et le code informatique qu’il faudra programmer.
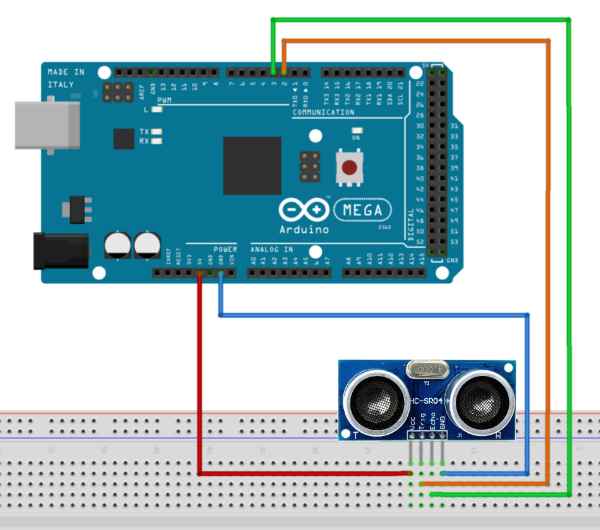
Le capteur de distance
Ce capteur se branche assez simplement. 4 entrées sur le capteur : courant, terre, écho et radar.
L’algorithme est assez simple l’on envoie une onde (capteur écho) et l’on calcul de temps écoulé dans le retour (capteur radar)
Le code se trouve facilement sur internet avec dans la boucle principale
/* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
/* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */
long mesure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT);
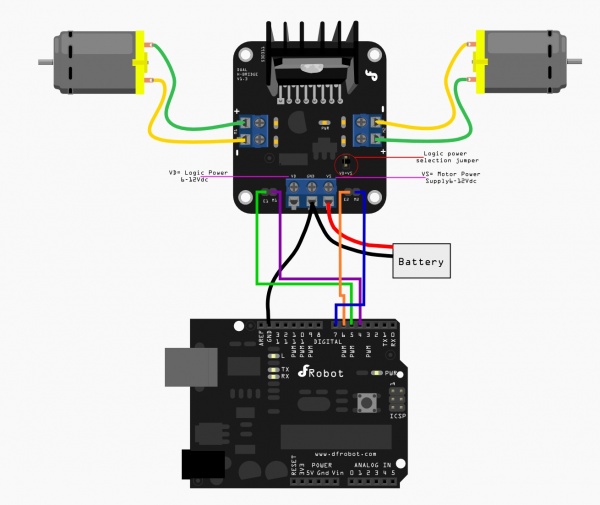
Module L298N de pilotage des 2 moteurs
L’objectif de cette étape est de relier le Bridge Motor aux 2 moteurs et à l’arduino.
– 4 fils pour les 2 moteurs,
– 2 pour relier le courant et la terre
– et les 4 E/S pour piloter les moteurs.
// arret du moteur 1
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
// marche avant du moteur 1
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
// marche arrière du moteur 1
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
Voila notre voiture robot avance et recule simplement.
La semaine prochaine l’objectif sera de rendre autonome la voiture dans la relier à un câble USB pour l’alimentation.
Posted in