Projet "robot car" en Arduino / étape 1 : assemblage
Accueil › Forums › Forums : Tous nos Projets › Projet "robot car" en Arduino / étape 1 : assemblage
Étiqueté : IA et voiture
- Ce sujet contient 6 réponses, 3 participants et a été mis à jour pour la dernière fois par
xavadam, le il y a 8 années et 11 mois.
-
AuteurMessages
-
6 mai 2017 à 14 h 55 min #5318
xavadam
Maître des clésA travers ce post nous allons partager la construction de notre premier « robot car » Arduino.

Nous imaginons 3 étapes:
– l’assemblage du chassie de la voiture
– le montage des éléments robotiques (moteur, capteurs …. etc)
– la programmation pour en faire un robot.1/ Kit de la voiture robot.
Pour nous simplifier nous avons pris un kit robot voiture tout fait sur ebay.
Sur toutes les plateformes de vente , vous pouvez trouvez des kits pas trop chère.Kit Motor Smart Robot 2WD Car Arduino HC-SR04 Driver 298 Breadboard Robotic kit
Apres quelques semaines d’attente, nous avons reçu le kit par la poste.

La première étape est d’assembler celui-ci (sachant que nous n’avons pas de plan ou notice.)
Premier assemblage prévu le 9 mai.2/ Assemblage du châssis :
Cette étape consiste à assembler au châssis de la voiture les 2 moteurs, les 3 roues, le porte batterie.
Cette étape ne pose pas de difficulté particulière. Il suffit de faire attention à visser les différents éléments dans les bons « trous » du châssis.
La prochaine étape sera de tester certains connexions vers l’arduino ( moteur, courant ….)
19 mai 2017 à 12 h 17 min #6212PhilJ
Maître des clésMerci Xavier et Adam pour la présentation de ce Kit « Robot car » Arduino !
Pour démarrer, j’ai bien envie d’acheter le même…L’avantage de notre permanence le mardi soir, c’est que l’on pourra échanger sur son montage, les tests et sa programmation.
Il est d’ailleurs possible qu’un tel kit soit utilisé à la rentrée de septembre par de nouveaux participants de l’atelier robotique.
20 mai 2017 à 21 h 03 min #6358Maître des clésCe mardi nous avons mis les fils qui relient le moteur des roues au composant qui pilotera les deux moteurs.

Nous avons testé les moteurs par sécurité. Apres une demi-heure de recherche un faux contact nous avons réussit à faire tourner les roues.22 mai 2017 à 17 h 57 min #6431fredclo
Maître des clés22 mai 2017 à 18 h 01 min #6433Maître des clésLe lien
24 mai 2017 à 13 h 40 min #6571Maître des clésTest des capteurs et modules
Voila châssis et les roues sont assemblés.
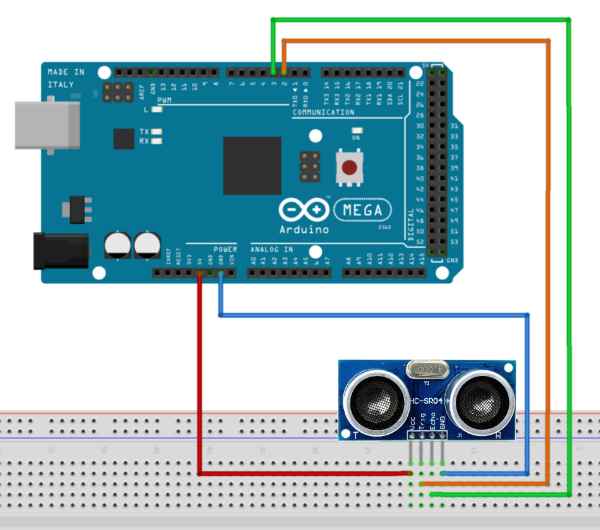
Avant de fixer les différents capteurs , nous allons les tester un à un afin de s’assurer qu’ils fonctionnent et le code informatique qu’il faudra programmer.Le capteur de distance
Ce capteur se branche assez simplement. 4 entrées sur le capteur : courant, terre, écho et radar.
L’algorithme est assez simple l’on envoie une onde (capteur écho) et l’on calcul de temps écoulé dans le retour (capteur radar)
Le code se trouve facilement sur internet avec dans la boucle principale
/* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */
digitalWrite(TRIGGER_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER_PIN, LOW);
/* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */
long mesure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT);
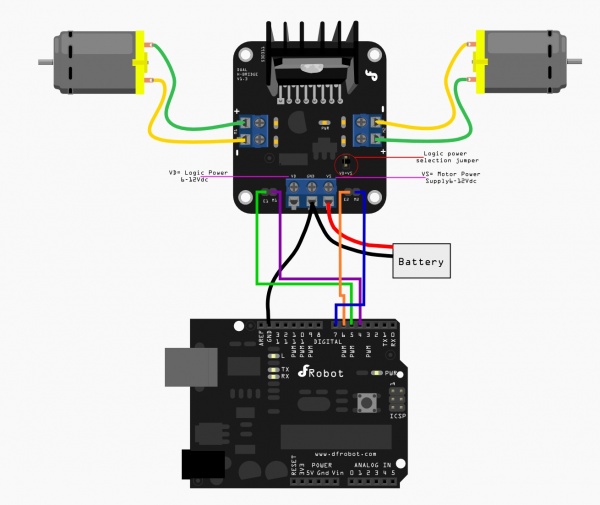
Module L298N de pilotage des 2 moteurs
L’objectif de cette étape est de relier le Bridge Motor aux 2 moteurs et à l’arduino.
– 4 fils pour les 2 moteurs,
– 2 pour relier le courant et la terre
– et les 4 E/S pour piloter les moteurs.
// arret du moteur 1
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
// marche avant du moteur 1
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
// marche arrière du moteur 1
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
Voila notre voiture robot avance et recule simplement.La semaine prochaine l’objectif sera de rendre autonome la voiture dans la relier à un câble USB pour l’alimentation.
6 juin 2017 à 16 h 11 min #7461Maître des clésMoteur pas à pas pour le capteur de distance
Nouveau module à relier : Le moteur pas à pas pour porter et faire pivoter le capteur de distance.
Là, il faut passer par le shield sensor qui se fixe sur l’arduino pour simplifier les connexions.
Le plus compliqué est de fixer le capteur de distance,socle et moteur pas à pas.
C’est 3 éléments indépendants sont à viser et à accrocher pour permettre au moteur de faire pivoter le capteur de distance.
Des impulsions plus ou moins longues permettent de déplacer le moteur suivant des angles trigonométriques.
Boitier d’alimentation (piles)
Dernière étape est la fixation du boitier d’alimentation externe (4 piles 1,5V) afin de rendre le robot car autonome électriquement.
Là, tout est très simple. 2 fils à relier sur le shield sur l’entrée terre et 5v.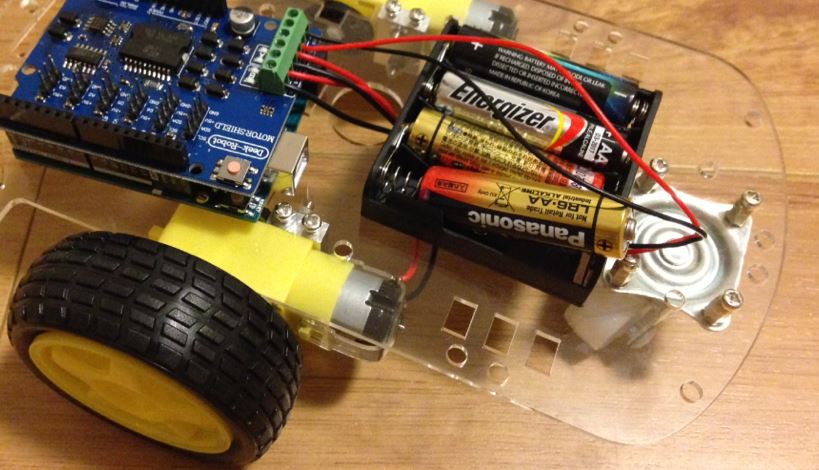
Bilan du montage
Voila, le chassis et les composants sont reliés . Ne reste maintenant que la partie programmation pour rendre le robot car « intelligent »….
A suivre mardi prochain …..
-
AuteurMessages
- Vous devez être connecté pour répondre à ce sujet.
Posted in